काठमाडौं ।
चाँडै नै पृथ्वीमा रहेका मानव अपरेटरहरूले चन्द्रमामा काम गरिरहेका ‘टेलिओपरेटेड रोभर’ अर्थात् परबाट सञ्चालन गरिएका रोबोटहरूलाई भर्चुअल रूपमा नियन्त्रण गर्न सक्ने आकलन गरिएको छ। यसले नमुना सङ्कलन गर्ने, खन्ने काम वा उपकरणहरू जोड्ने जस्ता कामहरू थप सहजताका साथ गर्न मद्दत पुर्याउने विश्वास गरिएको छ।
यसो भएको खण्डमा वैज्ञानिकहरूलाई चन्द्रमाको सतहमा काम गर्दा दूरसञ्चारमा आउने समयको ढिलाइबाट उत्पन्न हुने समस्या समाधान गर्नमा सहयोग पुग्ने स्पेस डटकमले उल्लेख गरेको छ।
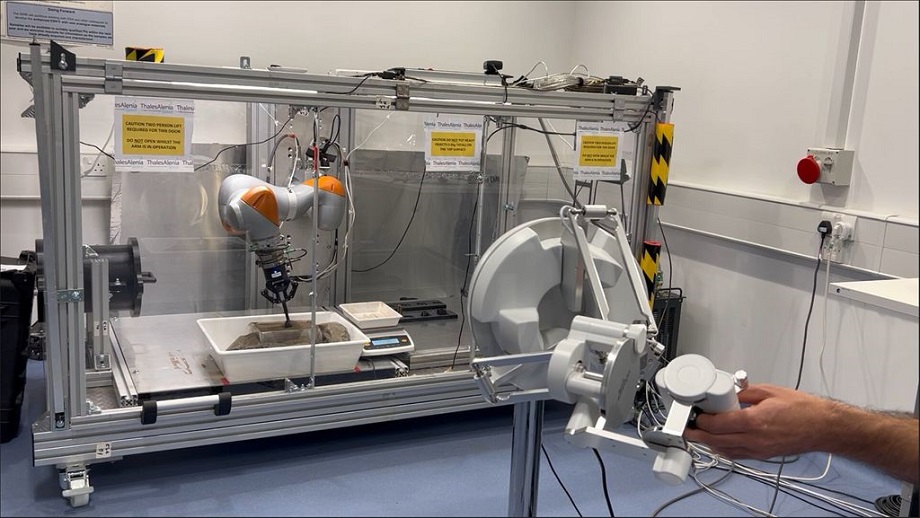
इङ्गल्याण्डको ब्रिस्टल विश्वविद्यालयका रोबोटिक्स अनुसन्धानकर्ताहरूले आफ्नो नयाँ टेलिअपरेशन प्रणालीलाई युरोपियन स्पेस एजेन्सी (ईएसए) को युरोपियन सेन्टर फर स्पेस एप्लिकेसन र टेलिकम्युनिकेसन (हरवेल, अक्सफोर्डशायर) मा परीक्षण गरेका छन्।
उनीहरूले एउटा भर्चुअल रोभरको नियन्त्रण गर्दै, त्यसको रोबोटिक हातलाई नक्कली चन्द्रमाको धूलो (सिमुलेन्ट) खन्न प्रयोग गरे। यस प्रक्रियाले पृथ्वी र चन्द्रमाबीचको १.३ सेकेन्डको समय ढिलाइका कारण क्यामरा फिडहरूको आवश्यकतालाई कम गर्छ।
भविष्यमा टेलिअपरेटरहरू र चन्द्रमाको रोबोटिक मिशनहरूबीचको संकेतहरू ईएसएको योजनाबद्ध मूनलाइट परियोजनाका उपग्रहहरूले प्रसारित गर्न सक्ने बताइएको छ।
ब्रिस्टलका जो लोउकाले एक वक्तव्यमा भने, “यस प्रकारको सिमुलेशनले हामीलाई चन्द्रमामा रहेका रोबोटहरूलाई पृथ्वीबाट रिमोटले चलाउन मद्दत गर्न सक्छ, जसले संकेतको ढिलाइको समस्यालाई समाधान गर्नेछ।”
यो भर्चुअल सिमुलेशनमा “ह्याप्टिक” अन्तर्क्रिया पनि समावेश गरिएको छ, जसले प्रयोगकर्तालाई चन्द्रमाको धूलोलाई महसुस गर्ने सुविधा दिन्छ। यसले टेलिअपरेटरहरूलाई चन्द्रमाको कम गुरुत्वाकर्षणको वातावरणमा धूलो खन्ने वा नमुना उठाउनेजस्ता काम गर्दा आवश्यक बलको बारेमा अनुभव दिन्छ।
स्पेस डटकमका अनुसार हालसम्म ह्याप्टिक अन्तर्क्रियाहरू केवल आधारभूत कामहरूको भर्चुअल संस्करणमा समावेश गरिएका छन्, जस्तै धूलोमा थिच्ने वा स्कूप चलाउने काम, तर अझैसम्म जटिल कार्यहरूको लागि समावेश गरिएको छैन।
लोउकाले भने, “हामी यस मोडेलमा गुरुत्वाकर्षण कत्तिको बलियो छ भनेर समायोजन गर्न सक्छौं, र ह्याप्टिक प्रतिक्रिया दिन सक्छौं, जसले अन्तरिक्ष यात्रीहरूलाई चन्द्रमाको धूलो कसरी महसुस हुन्छ भन्ने अनुभूति दिन्छ, जुन पृथ्वीको गुरुत्वाकर्षणको छैठौं भाग मात्र हो।”
यस प्रणालीले भविष्यमा चन्द्रमामा जाने अन्तरिक्ष यात्रीहरूलाई यथार्थपरक प्रशिक्षण दिन पनि प्रयोग गर्न सकिन्छ, जसले उनीहरूलाई त्यहाँको परिस्थितिको अनुभव दिन्छ।
“अन्तरिक्ष यात्रीहरूले आगामी चन्द्र अन्वेषण मिशनहरूको तयारी गर्न यस सिमुलेशनको प्रयोग गर्न सकून् भन्ने एउटा विकल्प हुन सक्छ,” जो लोउकाले भने। तर, त्यसअघि, विश्वास सम्बन्धी समस्या समाधान गर्न आवश्यक छ। यसअघिका अध्ययनहरूले भर्चुअल प्रणालीको प्रदर्शनलाई पूर्ण रूपमा विश्वास गर्न प्रयोगकर्तालाई मानसिक अवरोध हुने देखाएका छन्।
 लोउकाको टिमले आफ्नो भर्चुअल प्रणालीको दक्षता र विश्वसनीयता मापन गरेको छ। उनीहरूको परीक्षणमा, सिमुलन्ट (नक्कली चन्द्रमाको धूलो) खन्ने कार्य १००% सफल भएको थियो भने, प्रणाली ९२.५% समयमा विश्वसनीय देखिएको थियो।
लोउकाको टिमले आफ्नो भर्चुअल प्रणालीको दक्षता र विश्वसनीयता मापन गरेको छ। उनीहरूको परीक्षणमा, सिमुलन्ट (नक्कली चन्द्रमाको धूलो) खन्ने कार्य १००% सफल भएको थियो भने, प्रणाली ९२.५% समयमा विश्वसनीय देखिएको थियो।
स्कूपबाट सिमुलन्ट खसाल्दा थोरै कम विश्वसनीयता पाइएको थियो, तर स्कूपको उन्मुखता सीमित गरेर यो कार्य अझै बढी सटीकता साथ सम्पन्न गर्न सकिने निष्कर्षमा पुगे।
यो प्रणाली मुख्यत: चन्द्रमाका लागि बनाइएको भए पनि सिद्धान्ततः यसै प्रकारको टेलिअपरेशन प्रविधि मङ्गल ग्रहका मिशनहरूमा पनि प्रयोग गर्न सकिन्छ। विशेष गरी यो मङ्गल ग्रहबाट नमूना सङ्कलनका लागि उपयोगी हुन सक्छ, जहाँ रोभरबाट नमूना ट्यूबहरू सङ्कलन गरी अर्को सवारीमा लोड गरेर पृथ्वीमा ल्याउने चुनौतीपूर्ण कार्य हुनेछ।
नासाको मङ्गल ग्रहको नमूना-फिर्ता परियोजना बजेट र समयसीमाभन्दा बाहिर गइसकेको हुँदा, नासाले उद्योगसँग समाधान विकास गर्न सहयोग मागेको छ। रकेट ल्याबले हालसालै पर्सिभियरेन्स रोभरका नमूनाहरू कसरी फिर्ता ल्याउने भन्ने सम्भाव्य समाधानको अध्ययन गर्ने टेण्डर पाएको छ, यद्यपि टेलिअपरेशनले त्यसमा भूमिका खेल्नका लागि यो अझै छिटो हुन सक्छ।
तर भविष्यमा चन्द्रमा, मङ्गल र अन्य क्षुद्रग्रहहरू जस्ता खगोलीय वस्तुहरूको अन्वेषण र नमूना-फिर्ता मिशनमा टेलिअपरेशन प्रविधिले फाइदा पुर्याउन सक्छ।
“अर्को दशकमा हामी चन्द्रमामा नासाको आर्टेमिस र चीनको चेन्जको जस्तै धेरै मानवसहित र बिना मानवको मिशनहरू देख्नेछौं,” लोउकाले भने। “यस सिमुलेशनले ती मिशनहरूको तयारी वा सञ्चालनमा महत्त्वपूर्ण सहयोग पुर्याउन सक्छ।”
प्रकाशित: ६ कार्तिक २०८१, मंगलवार